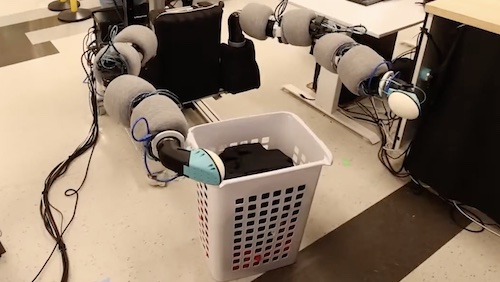
Our “bubbles” and various other compliant sensors turn hard robots into soft robots, allowing for intentional and advantageous contact-rich, sometimes sloppy but always controllable, interactions between our robot’s body and the world.
Read MoreOur Tactile team brings together complementary research and engineering expertise in soft robotics, manipulation, humanoid systems, physical human-robot interaction, education, entertainment, software development and consumer electronics.
Contact Us: punyo-info@tri.global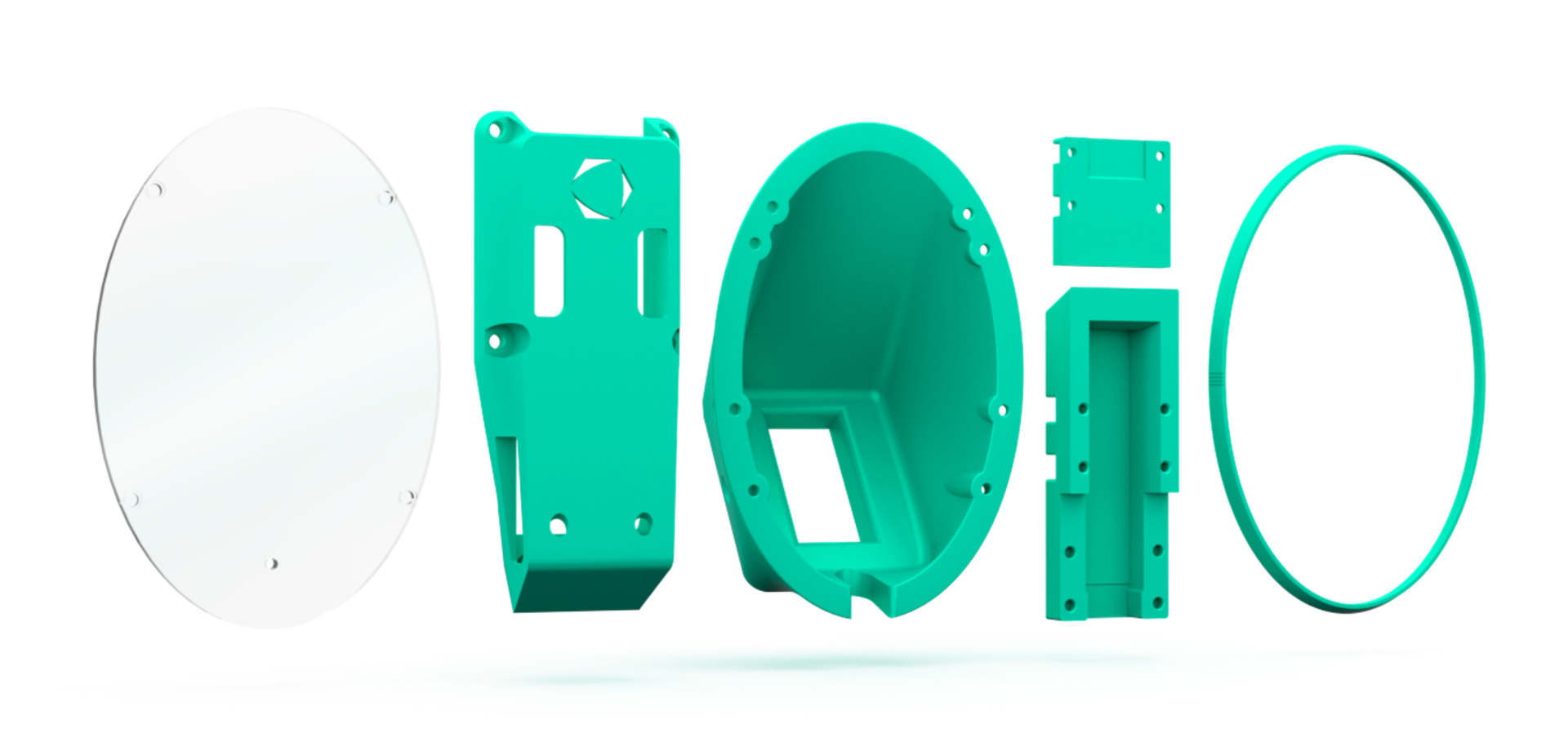
We are excited to release the build instructions and design files for our Punyo Bubble Gripper v2.0 so that our friends and colleagues can test our technology, improve upon it, and take us closer to building robotic assistants for the home! This new version is built around Intel's Realsense D405 Depth Camera
The Punyo project information is distributed using the Creative Commons Attribution-NonCommercial 4.0 International license.
For access to all the information you need to build your own Punyo Gripper, please view & acknowledge the license.
We developed a demonstration kit to showcase the Punyo Soft-Bubble Sensor. If you'd like to receive updates, please let us know.
Register for updates


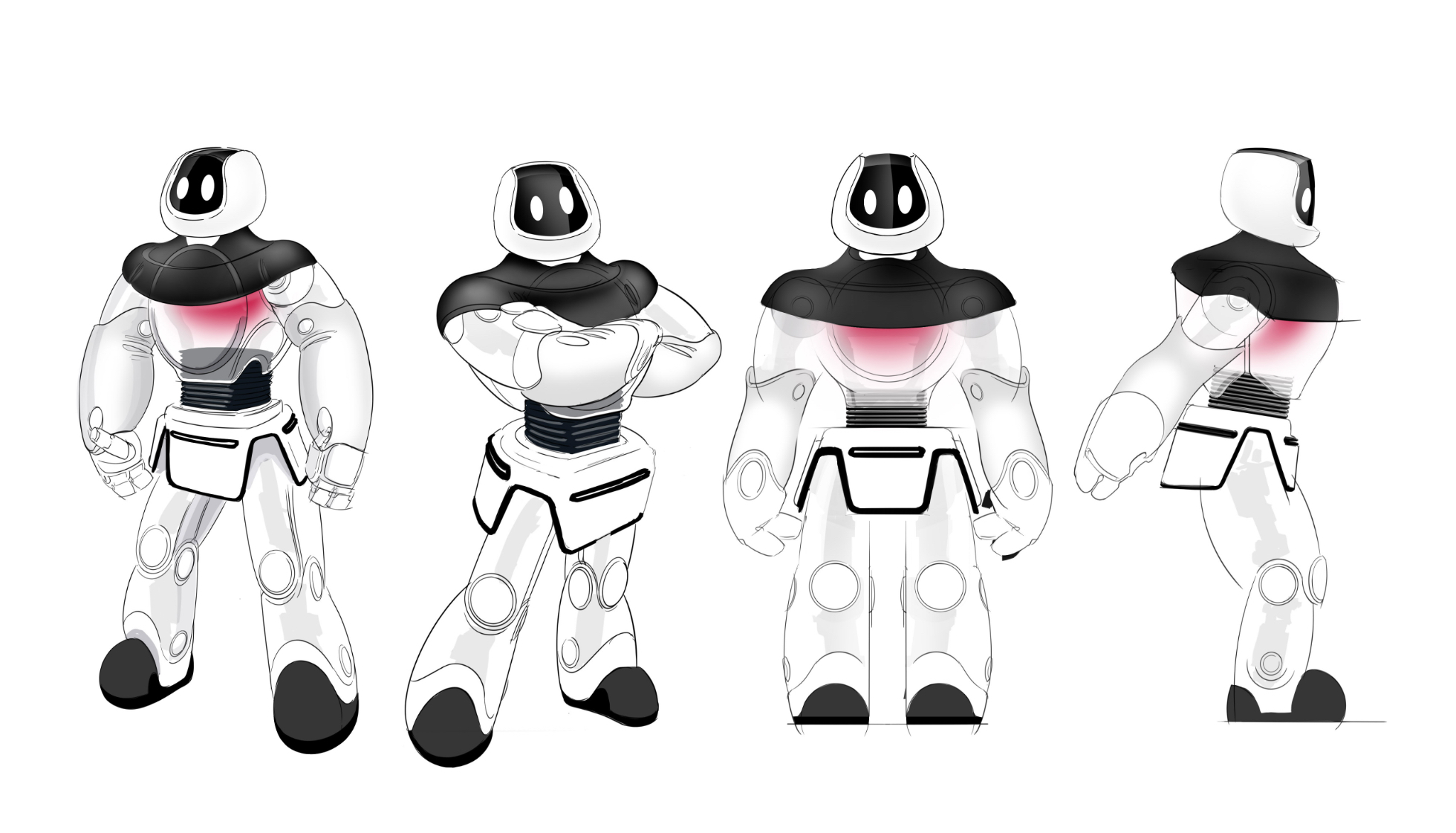
Punyo is an artistic rendering of the Tactile team’s dream domestic robot. The word “punyo” is a Japanese word that elicits feelings of chubby, cute resilience - our Punyo concept robot is soft, interactive, affordable, safe, durable and capable. Most importantly, unlike many other robots, Punyo is not afraid to safely make a lot of contact and uses its whole body to get jobs done and interact with the world and its humans.
 View License
View License